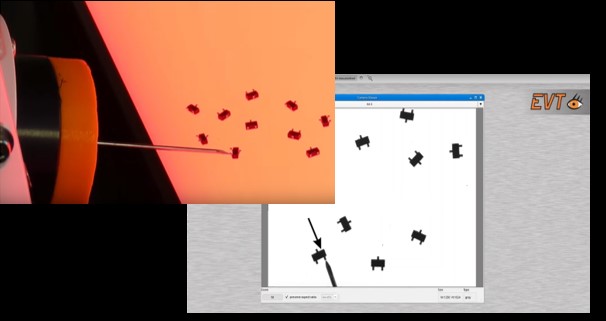

Die Bildverarbeitungssoftware EyeVision ermöglicht dem Anwender jetzt eine einfache und intuitive Hand-Eye-Kalibrierung für Roboter und Handhabungssysteme. Dabei führt der erweiterte Befehlssatz mit wenigen Klicks eine Hand-Eye-Kalibrierung bei Systemen in 2D und 3D durch. Ebenfalls steht ein RoboCom Befehl zu Verfügung, welcher die Kommunikation zu vielen Roboterherstellern beinhaltet, aber auch einfach an neue Roboter adaptiert werden kann. Über diesen Befehl können ebenfalls zahlreiche Handlingsysteme angesteuert werden.
Die Kombination aus Steuerung, Bildaufnahme in 2D oder 3D und der automatischen Adaption führt dazu, dass die Hand-Eye-Kalibrierung für das Roboterauge schnell und präzise realisiert werden kann.
Mit der automatisierten Absolutgenauigkeit führt die EVT GmbH eine neue Dimension des automatischen Greifens ein. Ein vollautomatischer Ablauf, der auf der Hand-Eye-Kalibrierung aufbaut, sorgt dafür, dass das Spiel und die Toleranzen in den Achsen automatisch erkannt und dann von der Bildauswertung korrigiert werden. Der automatisierte Ablauf in Verbindung mit dem optischen Sensor erspart dem Anwender die manuelle Korrektur von Greifpositionen im Arbeitsraum des Robotes.
Die Korrektur funktioniert mit jedem Roboter und verbessert dessen Positionierung im Greifraum durch automatische Berichtigung der Achs-und-Spiel Toleranzen der einzelnen Gelenke. Mit dieser Korrektur kann jedes Handhabungssystem, egal ob Roboter oder Mehrachsmanipulator, in der Genauigkeit innerhalb des kompletten Arbeitsraumes verbessert werden.
Weitere Informationen zu Robotvision mit der EyeVision Bildverarbeitung erhalten Sie unter www.evt-web.com oder via Mail und per Telefon!
Firmenkontakt und Herausgeber der Meldung:
EVT Eye Vision Technology GmbH
Gartenstraße 26
76133 Karlsruhe
Telefon: +49 (721) 66800423-0
Telefax: +49 (721) 62690596
http://www.evt-web.com
Ansprechpartner:
Elisa Deutsch
+49721668004230
Dateianlagen:
- Absolutgeauigkeit EVT
- Handeye Calibration EVT